| 提交詢價信息 |
| 發布緊急求購 |





價格:電議
所在地:北京
型號:
更新時間:2021-02-24
瀏覽次數:2354
公司地址:
![]()
劉經理(先生)
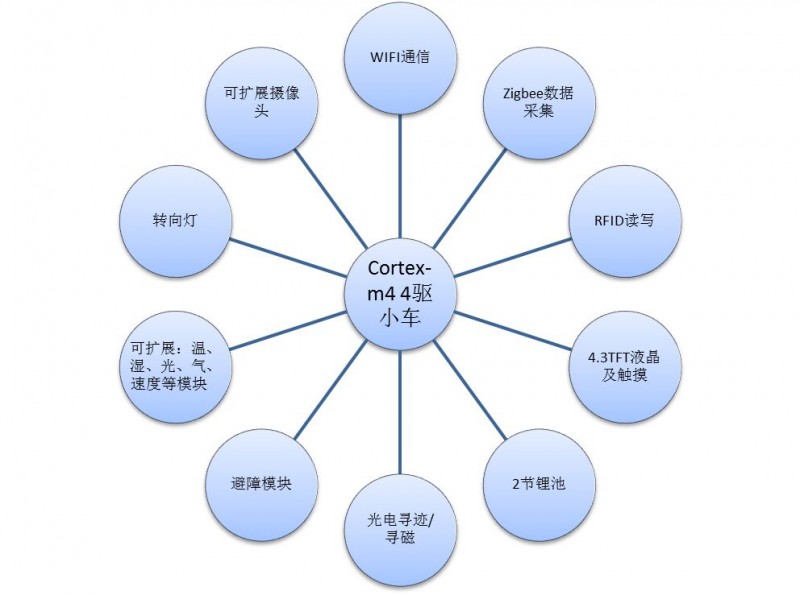
1. 智能小車是智能交通系統重要組成部分之一,具有自動循跡功能且能與路燈、ETC、公交車站、攝像抓拍、交通信號燈等聯動的控制,聯動方式可以通過ZIGBEE或WIFI完成。
2. ★結合智能交通可完成功能:ETC不停車收費、智能停車、圖像車牌識別、視頻人行檢測、視頻車輛逆行檢測、視頻車流量統計、視頻區間測速、自動報站、智能路燈、智能交通燈、小車尋跡、防追尾壁障、各種傳感器數據采集等子系統組成。
3. ★智能小車能完成功能:光電尋線、尋磁力線、自動左/右轉彎、前進、后退、停車、語音報站、自動避障等多種功能。
4. 尋跡種類:具有光電尋跡和電磁尋跡兩種功能。
5. 外圍數據采集模塊安裝在小車上,Cortex-M4綜合控制板控制小車運動到地點,外圍數據采集模塊在目的地采集實時的溫度、濕度、氣體濃度、圖像、位置等數據,得到的數據傳回核心控制器模塊。
6. ★系統采用模塊化分層設計:4驅小車驅動板、Cortex-M4綜合控制板、液晶、RFID、像機頭+各種擴展傳感器模塊組成。
基于Cortex-M4物聯網智能四驅小車實訓系統
1. ★車身尺寸:200(長)*120(寬)*86(高)mm
2. ★轉向燈:左轉燈、右轉燈;
3. ★語音報站:高保真有源訊響器;
4. 電池單元:12V鋰電池,帶充電保護板。
5. 測速單元:采用霍爾電流傳感器測速。
6. ★4個馬達單元:型號GA12-N20,減速馬達直流電機,全金屬齒輪,可順逆/正反轉,具有自鎖功能,噪音小,扭矩大,電機精小,扭力大,電流小,減速比大,電機運行靜音效果好。
? 電機zui大空載轉速:1000/min;
? 電機減速比:1:50;
? 供電方式:18650鋰電池組;理論工作時長:90min;
? 工作環境:溫度-20~+50℃;
? 濕度10~80%RH;
7. 電機支架:
? 高度:11mm;
? 寬度:25mm;
? 材質:ABS塑料;
? 兩個孔的中心間距16-18MM;
8. D字軸橡膠輪胎:優質橡膠實心胎,防滑、減震,內側有凹凸起齒,適合用于桌面型智能小車、機器人的動力車輪,通用性好;
9. ★RFID單元:頻率13.56M Hz,符合ISO14443A協議,讀卡有效距離:<5cm;13.56M射頻卡中寫入的不同信息來作為動作執行根據,可與智能沙盤其他功能部件(如路燈、交通信號、停車位管理等)聯動完成不一樣的動作。
10. 尋跡傳感器單元1
? 傳感器型號:ST188;
? 采用高發射功率紅外光電二管和高靈敏度光電晶體管組成;
? 檢測距離:4——13mm;
? 工作溫度:-20~+65;
? 響應時間:10ms;
11. ★尋磁傳感器單元2
? 采用進口常開型干簧管;
? 輸出方式:比較器輸出,信號波形穩定;
? 驅動電流:15mA;
? 工作電壓:3.3V-5V;
? 輸出形式:數字量輸出;
? 比較器:采用寬電壓芯片LM393;
12. 電機驅動芯片
? 芯片型號:L298P;
? 輸入電壓:6.5——12V;
? 邏輯部分工作電流Iss:<36mA;
? 驅動部分工作電流Io:<2A;
? zui大耗散功率:25W(T=75℃);
? 控制信號輸入電平:高電平2.3V
? 工作溫度:-25+130℃;
? 驅動形式:雙路大功率H橋驅動;
? 支持PWM/PLL模式電機速度控制;
13. 防追尾單元:
? 電壓:DC5V;靜態電流:小于2mA;
? 感應角度:≤15℃;
? 探測距離:2cm-450cm;
? 測量精度: 0.3cm;
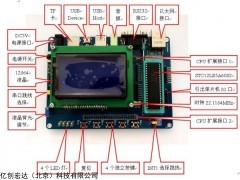
三、小車Cortex-M4核心控制板1. ★Cortex-M4 CPU核心板硬件技術參數
1) CPU:STM32F407ZGT6,CORTEX-M4內核的微處理器;工作頻率:168M,1MB FLASH,192K 的Data SRAM;3個I2C,3個SPI,6個USART,2路CAN,3個12位ADC轉換器,2個12位DAC轉換器,支持USB FS和JTAG調試;VDD監視器和溫度傳感器;
2) USB OTG接口;
3) 一個以太網接口:10/100自適應網口;
4) 一個DB9 RS232接口;
5) 液晶接口單元:可支持LCD 4.3TFT真彩液晶模塊;可擴展4.3寸觸摸屏;
6) 2路CAN通道接口;
7) 4個用戶指示燈,5個用戶按鍵;
8) 1個電源開關,一個復位鍵;
9) 一個電源指示燈;
10) 一個DV5V輸入接口;
11) 一個24C02存儲芯片;
12) 一個SPI FLASH W25Q16;
13) 語音接口:一路輸入、一路輸出;
14) RTC后背電池接口;
15) SD卡(SDIO接口):zui大支持32G;
16) 攝像頭模塊接口:預留可以外擴CMOS攝像頭接口;
17) 一個JTAG口;
18) 所有IO引出;
19) 片內看門狗定時器;
2. ★液晶顯示單元
? 尺寸:4.3寸TFT液晶,帶觸摸功能;
? 分辨率:480
? AM176220 TFT彩色液晶屏;
? SD卡接口;
? 讀寫周期:200ns;
? 滿屏刷新速度:≤13楨;
? zui大電流:200mA;
? 集成8MB SDRAM對應8頁顯示緩沖。顯示頁寄存器和讀寫頁寄存器設置,支持整頁快速切換。
? TFT支持LED背光,采用300Hz PWM信號驅動,能量轉換效率高,保證色彩準確還原、無閃爍效應,竄色現象。亮度支持從0~16間調節。
四、無線通信模塊1. ZIGBEE模塊
1. 撥動開關,模塊電源可以單獨控制;有效防止不必要的損壞。
2. 采用TI公司CC2530;
3. 與zigbee節點進行無線通信;與CPU進行串口通信協議;
4. 組網方式:星狀、網狀;
5. 模塊尺寸:45X110mm;
2. WIFI模塊(可選)
1. 撥動開關,模塊電源可以單獨控制;有效防止不必要的損壞。
2. 支持無線802.11 b/g/n 標準;
3. 頻率范圍:2.412GHz-2.484GHz;
4. 無線網絡類型:支持STA/AP/STA+AP 三種工作模式;
5. 發射功率
? 802.11b: +16 +/-2dBm (@11Mbps);
? 802.11g: +14 +/-2dBm (@54Mbps);
? 802.11n: +13 +/-2dBm (@HT20, MCS7);
6. 傳輸速率110-921600bps;
7. 內置TCP/IP協議棧,支持多路TCP Client連接;
8. 支持豐富的Socket AT指令;
9. 支持UART/GPIO數據通信接口;
10. 支持Smart l
11. 支持遠程固件升級(OTA);
12. 內置32位MCU,可兼作應用處理器 ;
13. 超低能耗,適合電池供電應用;
14. 3.3V 單電源供電;
? 模塊尺寸:45X110mm;
五、★能完成的實驗項目 1. 基礎實驗實驗1. GPIO實驗
實驗2. 中斷實驗
實驗3. 系統滴答定時器(SysTick)實驗
實驗4. 通用定時器(TIME)實驗
實驗5. 看門狗實驗
實驗6. 窗口看門狗實驗
實驗7. 串口實驗
實驗8. RTC實驗
實驗9. STOP模式實驗
實驗10. flash(SPI接口)讀寫實驗
實驗11. Eeprom_24C02讀寫實驗
實驗12. SD_CARD實驗
實驗13. 音頻實驗
實驗14. CAN總線通信實驗
實驗15. 基于USB設備的DEVICE實驗
實驗16. 基于UCB設備的HOST實驗
實驗17. TCP/IP網絡組件Lwip之Ping實驗
實驗18. TCPIP網絡組件Lwip之TCP Server實驗
實驗19. TCPIP網絡組件Lwip之TCP Client實驗
實驗20. TCPIP網絡組件Lwip之UDP Server實驗
實驗21. TCPIP網絡組件Lwip之UDP Client實驗
實驗22. LCD實驗
實驗23. 觸摸屏實驗
實驗24. 超聲器測距實驗
實驗25. RFID-13.56M讀寫卡實驗
實驗26. 光電傳感器實驗
實驗27. 電磁傳感器實驗
實驗28. 轉向燈及剎車燈實驗
實驗29. 小車運行(前進、后退、左轉、右轉)控制實驗
實驗30. 小車尋跡實驗
實驗31. 多站點語音播報實驗
實驗32. 小車綜合實驗
2. 操作系統實驗實驗33. 多任務實驗
實驗34. 信號量實驗
實驗35. 郵箱實驗
實驗36. 消息隊列實驗
實驗37. 事件標志組實驗
實驗38. Ucosii(2.86)+ucgui(3.90a)+ucgui_demo實驗
3. ZigBee實驗實驗1. 跑馬燈實驗
實驗2. 中斷實驗
實驗3. 定時器T1(查詢方式)實驗
實驗4. 定時器T3(中斷方式)實驗
實驗5. 串口實驗
實驗6. 休眠中斷喚醒實驗
實驗7. 休眠定時器喚醒實驗
實驗8. 看門狗實驗
實驗9. 蜂鳴器實驗
實驗10. ADC采集電壓實驗
實驗11. ZIGBEE通信實驗(需要2個小車)
4. 可擴展實驗項目(需另配模塊完成)實驗1. 可燃氣體傳感器實驗
實驗2. 人體紅外傳感器實驗
實驗3. 溫濕度傳感器采集實驗
實驗4. 加速度傳感器實驗
實驗5. 氣壓傳感器實驗
實驗6. 光照度傳感器實驗
實驗7. GPS定位實驗
實驗8. WIFI實驗
實驗9. 圖像采集實驗
實驗10. 視頻傳輸實驗
實驗11. 硬件自檢測試實驗
5. 無線傳感器實驗(需另Zigbee節點,每個模塊配一個)實驗12. Zigbee可燃氣體傳感器實驗
實驗13. Zigbee人體紅外傳感器實驗
實驗14. Zigbee溫濕度傳感器采集實驗
實驗15. Zigbee加速度傳感器實驗
實驗16. Zigbee氣壓傳感器實驗
實驗17. Zigbee光照度傳感器實驗
七、標準配置|
類別 |
模塊名稱 |
技術參數 |
數量 |
|
主體 |
基于Cortex-M4物聯網智能四驅小車實訓系統 |
小車驅動板 |
1 |
|
CORTE-M4主控板 |
主處理器采用STM32F407ZGT6,CORTEX-M4內核的微處理器 |
1 |
|
|
Jl |
USB接口 |
1 |
|
|
ZIGBEE協調器 |
采用TI cc2530 |
1 |
|
|
Zigbee仿真器 |
USB |
1 |
|
|
液晶+觸摸屏 |
4.3寸TFT LCD |
1 |
|
|
RFID模塊 |
頻率13.56M |
1 |
|
|
避障模塊 |
超聲波 |
1 |
|
|
尋跡模塊 |
光電傳感器 |
1 |
|
|
尋磁模塊 |
電磁傳感器 |
1 |
|
|
鋰電池 |
帶充電功能鋰電池 |
1 |
|
|
配件 |
電源及充電器 |
1 |
|
類別 |
模塊名稱 |
技術參數 |
備注 |
|
數據采集類(可單選或多選) |
溫/濕/交通燈 |
溫度、濕度、交通燈 |
可單選或多選 |
|
人體紅外/可燃氣體 |
人體紅外熱釋電傳感器、可燃氣體傳感器 |
||
|
陀螺儀 |
陀螺儀傳感器 |
||
|
氣壓/3軸加速度/光照度模塊 |
氣體壓力、3軸加速度、光照度 |
||
|
Zigbee節點(按模塊數量選) |
TI公司CC2530 |
||
|
GSM/GPRS模塊 |
GSM/GPRS |
||
|
GPS定位模塊 |
GPS |
||
|
數據類(可單選或多選) |
WIFI模塊 |
WIFI無線通信 |
|
|
攝像頭 |
視頻采集 |
 免責聲明:以上所展示的[ 基于Cortex-M4物聯網智能四驅小車實訓系統]信息由會員[億創宏達(北京)科技有限公司]自行提供,內容的真實性、準確性和合法性由發布會員負責。
免責聲明:以上所展示的[ 基于Cortex-M4物聯網智能四驅小車實訓系統]信息由會員[億創宏達(北京)科技有限公司]自行提供,內容的真實性、準確性和合法性由發布會員負責。